
4.2 机械手
机械手作为消防救援机器人的执行机构,主要起到抓取可疑物,开启阀门,起吊受伤人员的作用。根据人手臂运动的原理以及目前机械手应用的资料,三节臂杆6个自由度的机械手工作装置是最有前途的。
如图2机械手自由度示意图所示,机械手,自由度为本身旋转的自由度,b自由度为臂杆1上下转动的自由度,c自由度指的是臂杆2以臂杆1的纵向轴线为中心转动的自由度,d自由度指的是臂杆3以臂杆2的纵向轴线为中心转动的自由度,e自由度为伸缩臂杆3的平移自由度,f为机械手爪以臂杆3纵向轴线为中心旋转的自由度。
机械手爪需要模拟人手的特征,在抓握的过程中知道获得应有的抓握力。所以考虑在手爪的指或者内部安装触觉传感器。手爪产生的抓握力在垂直方向上产生摩擦力,摩擦力阻止被抓取物由于重力的下落,当手爪与被抓取物之间产生滑动,触觉传感器传送信号使控制系统增加抓握力,直到滑动停止,同时手爪还有弥补滑动位移的措施。

救援机器人需要将受伤人员举起送到救援拖斗上,机械手设计最小的抓举力一般为90 kg,采用液压控制技术,机械手运动精度通过液压伺服系统来控制。
4.3 救援拖斗
救援拖斗在消防救援机器人中是不可缺少的一部分,它类似于火场救援时使用的担架,在火场中,消防救援机器人利用机械手将受伤人员转移到救援拖斗上,通过电液控制将拖斗移动到机器人机体内,然后消防救援机器人返回后方以便受伤人员得到及时的救助。同时救援拖斗在微小空间内还集成了供气系统,为受伤人员提供新鲜的空气。在救援拖斗的设计中,应该考虑以下方面:
(1)根据担架资料,一般的担架展开后外型尺寸(长*宽*高)为2200mm*550mm*l50mm,考虑
到机器人为违程遥控工作以及受伤人员需移动到机器人机体内,因此救援拖斗的尺寸应该适当的放大,必须保证受伤人员在机体内的宽度和高度,救援拖斗设计时,拖斗尺寸一般为(长*宽*高)2200mm*700mm*300mm左右;
(2)考虑行走过程中救援拖斗的平稳性,消防救援机器人在行进过程中上下颠簸和机器人启动刹车、加速减速产生的震动作用于被受伤人员,给受伤人员特别是骨折病人或外伤病人造成痛苦,并带来种种不安全因素,拖斗必须有一定的减震装置,来减少救援机器人行走时的震动;
(3)救援拖斗的防滑性能,救援拖斗在空间呈一定角度放置,没有安装绑带装置,考虑到有些受伤人员处于昏迷状态,无法控制自己身体的滑移,必须有一定的防滑性能,以确保转送安全。
4.4 电液控制系统
消防救援机器人的电液控制系统是由操作人员手持无线发射器发出控制信号给电控系统,电控系统接收到指令后对液压元器件进行控制,实现消防救援机器人的各项功能。
(1)无线遥控及原理
消防救援机器人控制系统采用非交流电动力和先进的无线控制技术,功能强大、体积小巧的可编程序控制技术组成,主要有无线遥控、电控箱等设备。控制系统由无线控制发射器、无线控制接收器、可编程控制器PLC、测速传感器、测温传感器、油门位移传感器及执行机构等设备组成。图3控制系统框图如下:
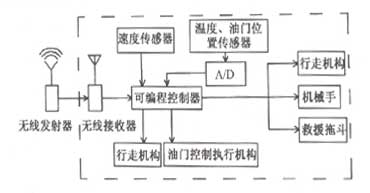
图3 控制系统框图
图3中虚线框为电控箱控制功能框图,无线发射器由控制人员手持。无线发射器能发出控制消防救援机器人所具备功能的全部动作信号而且控制半径不大于150m,可使操作者在消防救援机器人后150m远处遥控操作,电控箱中的可编程控制器能接收无线接收器发出的全部控制信号并根据不同的信号执行相应指令,并实时监控消防救援机器人的工况,使执行机构正确的作出相应动作。
(2)液压控制技术
消防救援机器人液压系统一般采用双泵系统。双泵液压系统实际上是两个单泵系统的组合。每台泵各自供给回路中的执行元件。泵的功率是由各自回路所需的功率而定的,这样可以保证复合动作。当系统中只需要进行动作而又要充分利用发动机功率时,可采用合流供油方式,即将两台液压泵的流量同时供给一个执行元件,这样可使执行机构的运动速度提高一倍,该种双泵液压系统在机器人中已被广泛应用。
(3)功率利用和功率分配
消防救援机器人的各执行机构能力是错综复杂的,柴油机后面还有液压泵,液压泵对柴油机功率的利用与传递,将对消防救援机器人的各项能力起决定性的作用,不能单纯由柴油机功率来决定。在执行工况时,液压系统还有发热、压力能以及功能等各种形式的能量损失,功率利用要尽量减少这些损失,并充分利用与传递发动机的有效功率。在功率利用方面,双泵变量系统要优于双泵定量系统,总功率变量系统要优于分功率变量系统。此外,采用合流也是提高功率利用的一个途径。执行机构分组的合理与否,对改善功率利用也是一个重要方面,因为执行元件的分组,将牵涉到双泵之间的功率分配,根据救援机器人在机械手工作中要求机械手爪与小臂同时动作,在小臂提升与回转过程中又要求动臂缸和回转马达同时动作的工作要求,采用两个功率相同的液压泵,分别向两个回路供油的系统。
5 结束语
消防救援机器人采用履带行走系,接地面积大、接地比压小,能在恶劣环境条件下进行有效的工作,能实现原地转弯和良好的越野性能。消防救援机器人控制系统采用交流电动力和先进的无线控制技术。整机液压驱动,实现无级调速,具有过负荷保护能力,提高了消防救援器人的使用效果。


 化工仓库防火安全技术总指导静电喷涂防止粉尘爆炸方面的安全对策…火工品管理安全措施预防煤层自燃发火安全技术措施防止主井向井下串烟火的安全技术措施火灾类危险源控制方案粉尘防爆技术电气火灾的起因——电气火灾及其防患
化工仓库防火安全技术总指导静电喷涂防止粉尘爆炸方面的安全对策…火工品管理安全措施预防煤层自燃发火安全技术措施防止主井向井下串烟火的安全技术措施火灾类危险源控制方案粉尘防爆技术电气火灾的起因——电气火灾及其防患 消防防火安全措施方案消防安全出口设置要求动火作业安全注意事项消除静电的方法有哪些?火灾事故应急处置措施冬季安全生产六防措施企业火灾事故预防措施安全疏散通道的设置要求
消防防火安全措施方案消防安全出口设置要求动火作业安全注意事项消除静电的方法有哪些?火灾事故应急处置措施冬季安全生产六防措施企业火灾事故预防措施安全疏散通道的设置要求



